I. What are Weight Sensors?
A weight sensor is by definition a particular kind of transducer, a weight transducer. It transforms an electrical output signal that can be measured, transformed, and standardized from an input mechanical force—such as a load, weight, tension, compression, or pressure—into another physical variable. The electrical signal changes proportionately to the force applied to the sensor.
In numerous industries, including automotive, robotics, aerospace and defense, medical and pharmaceutical, industrial automation, and high precision production, weight transducers have become indispensable components. Surgical robotics and collaborative robots (Cobots) have made significant strides recently, and as a result, numerous new applications for weight measuring have emerged.
Ⅱ.How does a Weight Sensor work?

First, we must comprehend the fundamental physics and material science of the strain gauge, also known as the strain gage, which is the basis for the strain weight measurement method. A sensor whose electrical resistance changes in response to applied force is called a metal foil strain gage. Stated differently, force, pressure, tension, compression, torque, weight, etc. are all transduced (or converted) into a change in electrical resistance that can be measured.
Electrical wires firmly affixed to a film in a zigzag pattern serve as strain gauges. This film stretches and lengthens when it is tugged, as do the conductors. It becomes shorter and more constricted when pushed. The resistance in the electrical conductors changes as a result of this shape shift. This technique allows for the determination of the strain applied in the load cell since strain gauge resistance increases with applied strain and decreases with contraction.
A weight transducer’s structural component is a metal body, also known as a flexure, to which foil strain gauges are linked. Typically composed of aluminum or stainless steel, the sensor body has two crucial properties: (1) it is robust enough to support heavy loads, and (2) it has the elasticity to flex slightly before returning to its original shape when the force is released.
The metal body behaves as a “spring” and deforms somewhat when force (tension or compression) is applied; unless it is overloaded, it then returns to its original shape. The strain gage’s shape and electrical resistance vary in tandem with the flexure’s deformation, resulting in a differential voltage variation that travels through a Wheatstone Bridge circuit. As a result, the load cell circuit voltage output can be used to calculate the physical force applied to the flexure, which determines how much the voltage changes.
The configuration of these strain gauges is known as a Wheatstone Bridge Circuit (see animated diagram). This indicates that the force being measured’s measuring grid is aligned in accordance with the interconnection of four strain gauges as a loop circuit (load cell circuit).
The load cell circuit receives regulated excitation voltage from the strain gauge bridge amplifiers, also known as strain gauge amplifiers, which then transform the mv/V output signal into a more user-friendly signal. The low strength signal produced by the strain gage bridge may not be compatible with the PLC, data acquisition modules (DAQ), computers, or microprocessors, among other system components. Excitation voltage, noise reduction or attenuation, signal amplification, and output signal conversion are therefore among the activities of a load cell signal conditioner.
Additionally, using the load cell circuit voltage equation, the change in the amplifier voltage output is calibrated to be linearly proportional to the Newtonian force supplied to the flexure.
Ⅲ.What are the advantages of strain gage-based weight sensors?
Strain gage-based weight sensors have several advantages over other types of weight sensors. They are highly accurate and can measure small changes in weight with great precision. They are also very sensitive to changes in temperature and humidity, which makes them ideal for use in harsh environments12. Strain gage-based sensors are also relatively low-cost, which makes them an attractive option for many applications.
Ⅳ.Types of Weight Sensors
Eight categories—photoelectric, hydraulic, electromagnetic force, capacitive, magnetic pole variation form, vibration, gyro, and resistance strain—are used to categorize weight sensors based on the conversion method. The resistance strain type is the most commonly utilized.
1. Photoelectric Weight Sensor
It comprises the code disc type and the optical grating type.
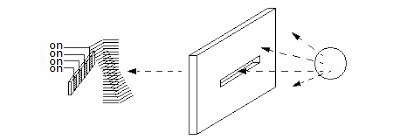
Optical grating sensors translate angular displacement into photoelectric signals via moiré fringes produced by gratings. There are two gratings: a moving grating positioned on the dial axis and a fixed grating. The test object placed on the load-bearing platform causes the moving grating to rotate, which in turn causes the moire fringe to move in tandem with the dial shaft’s rotation through the transmission lever system. We may determine the rotation angle of the grating by counting the moire fringes, which allows us to read the quality of the measured object. Photocells, conversion circuits, and display devices are the tools used for this process.
The code wheel, also known as the symbol board, of the code wheel sensor is a transparent glass piece that is fixed to the dial shaft and has black and white codes assembled using a specific coding scheme. The code wheel turns at a specific angle in response to the test object on the load-bearing platform rotating the dial shaft via the force transmission lever. The photocell will receive the optical signal via the code wheel, translate it into an electrical signal, which will then undergo digital processing by the circuit before being displayed along with the measured quality’s number. Electromechanical combination scales were the major use for photoelectric weight sensors.
2. Hydraulic Weight Sensor
The hydraulic oil pressure rises in response to the measured object’s gravitational force P, and the magnitude of the rise is proportional to P. We may ascertain the object’s quality by monitoring the pressure increase. Although the hydraulic weight sensor has a broad measuring range and a sturdy, straightforward construction, its precision typically does not go above 1/100.
3. Capacitive Weight Sensor
It operates by utilizing the proportional relationship between the electrode plate distance (d) and the oscillation frequency (f) of the capacitor oscillation circuit. Two electrode plates are present; one is stationary, and the other is moveable. The leaf spring deflects, changing the distance between the two electrode plates and, in turn, the oscillation frequency of the circuit when the test object is positioned on the load-bearing platform. We can identify the object of the object by monitoring the shift in frequency. With an accuracy of 1/200 to 1/500, capacitive weight sensors are less expensive and require less power to operate.
4. Electromagnetic Force Weight Sensor
It makes use of the idea that the electromagnetic force and the load on the load-bearing platform are balanced. One end of the lever is tilted upward when the test object is placed on the load-bearing platform. The photoelectric component detects this tilt signal, amplifies it, and then allows it to flow into the coil to create an electromagnetic force that balances the lever. The quality of the object being tested can be ascertained by digitally converting the current that produces the electromagnetic balance force. The weighing range of the electromagnetic force weight sensor is limited to tens of mg to 10 kg, despite its great accuracy of 1/2000 to 1/60000.
5. Magnetic Pole Variation Weight Sensor
Internal stress and altered permeability result from the ferromagnetic element being mechanically deformed by the measured object’s gravity. This causes the induced voltage of the secondary coil wound around the ferromagnetic element (magnetic pole) to alter correspondingly. By measuring the voltage change, we may find the force acting on the magnetic pole and, from there, the object’s mass. The magnetic pole variation weight sensor typically has an accuracy of 1/100. Tens to tens of thousands of kg is its weighing range, making it appropriate for big tonnage weighing tasks.
6. Vibrating Weight Sensor
The elastic element’s inherent vibration frequency is proportional to the square root of the applied force once it has been subjected to force. We may determine the force of the observed object operating on the elastic element by measuring the change in natural frequency, and we can then determine the mass of the object. Vibrating wire and tuning fork types are the two types of vibrating sensors available.
A string wire serves as the elastic component of a vibrating wire sensor. The intersection point of the V-shaped string is pushed downward when the object is on the load-bearing platform, and the pulling forces of the left and right strings are increasing and decreasing, respectively. The two strings’ innate frequencies fluctuate in various ways. The mass of the object can be determined by computing the difference between the two frequencies.
Ⅴ. Weight Sensor Composition
Weight sensors usually consist of the following parts:
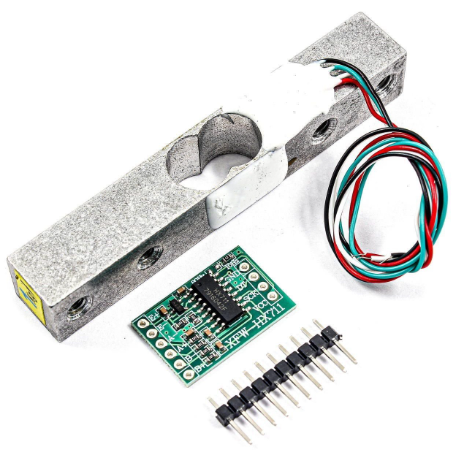
Sensing element: usually a strain gauge or weighing cell, responsible for converting mechanical force into an electrical signal.
Signal conditioning circuit: used to amplify and filter the electrical signal output by the sensor.
Data acquisition system: used to receive and process the electrical signal output by the sensor.
Communication interface: used to transmit data to other devices or systems.
Ⅵ.Weight Sensor Materials
The materials of weight sensors usually include parts such as elastomers, circuit boards, cables and housings. Among them, elastomer is the core component of the weight sensor, which is generally made of metal, such as aluminum alloy, alloy steel or stainless steel. Different materials are suitable for different application environments. For example, electronic price scales commonly used in shopping malls, supermarkets and other shopping places usually use aluminum alloy cantilever beam sensors; while weighing feeders used in factory production often use steel cantilever beam sensors. In addition, circuit boards and cables are key components in weight sensors, which are responsible for transmitting the signals output by the sensors to the data acquisition system. The housing is an important part of protecting the internal components of the weight sensor from damage and contamination.
Ⅶ.Installation Precautions of the Weight Sensor
It is crucial to make sure that the base’s mounting surface is clear of dirt, oil film, or rubber film before attaching a weight sensor. The strength and rigidity of the mounting base should be adequate, ideally more than those of the sensor itself. Handle the load cell with care, particularly if its elastomer material is an aluminum alloy. When handling and installing big capacity weighing sensors, it is advised to utilize the proper lifting equipment. Every weighing sensor has a loading direction, which needs to be identified and followed when loading the load.
Baffles should be placed as far around the weighing sensor as feasible or even cover the sensor with a thin metal plate to stop debris from contaminating the sensor. Even though weighing sensors have a certain amount of overload capacity, it is nevertheless advisable to prevent sensor overload during weighing system installation. During installation, you can swap out the sensor with a pad that is the same height as the sensor first, and then swap out the sensor itself. The mechanical overload protection structure should normally be established by the sensor during normal operation.



